

JSAE-SICE Automotive Industry Special Event
Japan-Thailand Exchange in Automotive Industry
- Date
- Sep. 12th (Fri.) 13:20–15:20
- Sep. 12th (Fri.) 15:30–16:50
- Room
- Petcharat 2
JSAE-SICE Automotive Control and Modeling Committee will organize this special talk session to promote collaboration activities between Thailand and Japan in regard to tackle research subjects such as carbon neutrality, traffic accident reduction and application of intelligent technology.
The researchers and engineers related to Thailand and Japan from academia and automotive industry will give talks in this session. The topics of this session covers wide research areas such as control theories, modeling technology, optimization and intelligent technology. Its application is varied to automobile, micro-mobility, mobile robot, etc. and its system scale from vehicle level to society level.
Chair
Yuji Yasui (Honda R&D Co., Ltd.)
Co-chair
Yoshihiro Mizoguchi (Kyusyu University)
Schedule
| 13:20–14:00 |
“Transformable Exoskeleton-Wheelchair Platform for Enhanced Mobility” Ronnapee Chaichaowarat (Chulalongkorn University) |
|---|---|
| 14:00–14:40 |
“Challenges of Adaptive Output Feedback and Output Predictive Controls
in Engine Control and HEV Energy Management” Ikuro Mizumoto (Kumamoto University) |
| 14:40–15:20 |
“Maximization of Smart Mobility Service Revenue
Considering Ride-share Discount Rate Using Dynamic Programming” Wenjing Cao (Sophia University) |
| 15:20–15:30 | Break time |
| 15:30–16:10 |
“Machine learning approach to engine control using MIP” Masakazu Mukai (Kogakuin University) |
| 16:10–16:50 |
Honda’s advanced technology toward carbon neutrality, safety and freedom of mobility Siriorn Pitanuwat (Honda Motor Co., LTD.) |
Transformable Exoskeleton-Wheelchair Platform for Enhanced Mobility
Associate Professor Ronnapee Chaichaowarat
Chulalongkorn University

This work presents the development of a novel wheelchair-exoskeleton hybrid robot designed to enhance human mobility by combining the advantages of wheeled locomotion with the adaptability of a wearable robotic exoskeleton. The system leverages the stability, safety, and low energy consumption of wheelchair driving on flat surfaces, while providing the capability to stand up, walk, climb stairs, and step over obstacles through its exoskeleton structure. The design separates the lower-extremity exoskeleton, the wheel driving mechanism, and the lifting mechanism to ensure both modularity and functional efficiency. During sitting, the user’s weight is supported by a saddle seat and hip joints, with the backrest adjustable for comfort. When transitioning to walking mode, the wheel modules and supporting mechanisms are folded and integrated compactly against the body, thereby reducing the burden on the legs and minimizing interference with natural gait.
Challenges of Adaptive Output Feedback and Output Predictive Controls in Engine Control and HEV Energy Management
Professor Ikuro Mizumoto
Kumamoto University

Environmental issues such as global warming and air pollution have become global challenges, and the automotive industry is expected to contribute by improving fuel efficiency through improving engine combustion performance and HEV (hybrid electric vehicle) energy management. Therefore, the advanced engine control of vehicles and energy management of HEVs continue to attract considerable attention in efforts to achieve a sustainable, low-carbon society. To realize optimal controls for engine control and HEV energy management, several control strategies have been applied. In my talk, an adaptive output feedback control strategy and an output predictive control strategy based on the system’s almost strictly positive real (ASPR) properties are presented as a method for controlling the vehicle engine and HEV energy management strategy. The feature of ASPR-based control strategies is that one can design a simple and robust control system. Unfortunately, however, most practical systems, including vehicle systems, do not satisfy the ASPR conditions. This problem can be solved by introducing a parallel feedforward compensator (PFC). Thus, adaptive control and predictive control methods with PFCs for controlling vehicle engines and HEV energy management are presented.
Maximization of Smart Mobility Service Revenue Considering Ride-share Discount Rate Using Dynamic Programming
Associate Professor Wenjing Cao
Sophia University

With the advancement of autonomous driving technology and vehicle electrification, various mobility services can be considered for depopulated and/or isolated areas. In this scenario, service providers need to ensure sustainable operations while meeting customer needs. To achieve this, we analyzed the relationship among mobility service price, ride-share discount rate, customer utilization rate, and revenue. Based on data generated using a smart satellite city simulator, mathematical models are established. To determine the optimal pricing strategy that maximizes annual revenue over the course of a year, considering the dynamic interplay between these factors, an optimization method is proposed. The data analysis results demonstrated the effectiveness of the proposed method in improving the annual revenue of the mobility service.
Machine learning approach to engine control using MIP
Professor Masakazu Mukai
Kogakuin University
This study considers a model predictive control framework that employs mixed integer programming (MIP) to construct a deep neural network (DNN) model with a rectified linear unit (ReLU) activation function. An accurate DNN model with a ReLU activation function is constructed using past time series input data from a diesel engine. In this approach, the ReLU activation function is represented by inequalities incorporating binary variables. The resulting model predictive control problem is formulated as a mixed integer programming problem and applied to control the diesel engine. A dynamic DNN model of a diesel engine is constructed using experimental data. This model can represent complex engine phenomena, such as strong nonlinearity and delay. Simulation results based on the Worldwide Harmonised Transient Cycle (WHTC) verify the effectiveness of the proposed method. Using systematic model predictive control to control the DNN overcomes the difficulties posed by nonlinearity, delay and interference in the diesel engine control problem.
Honda’s advanced technology toward carbon neutrality, safety and freedom of mobility
Dr. Siriorn Pitanuwat
Honda Motor Co., LTD.

As the automotive industry undergoes rapid transformation, intelligent safety, freedom of mobility, and energy management remain at the core of sustainable mobility. This presentation introduces the pioneering works of Honda, a global leader in automotive innovation, in advancing driving safety systems and automated driving vehicles and smart Vehicle-to-Grid (V2G) energy management solutions. Key highlights include automated driving and safety assistance system technologies using AI, as well as V2Gtechnologies that enable intelligent energy flow between electric vehicle fleet and the power grid network enhancing efficiency and grid stability. Beyond that, this talk also seeks to spark curiosity and motivate the next generation of engineers to contribute to the evolution of smart and sustainable mobility.
Demonstration of “AI-based Safety Assistance System”
- Date & Time
- Sep. 9th (Tue.) 14:00–17:00
- Sep. 10th (Wed.) 9:00–17:00
- Sep. 11th (Thu.) 9:00–17:00
- Location
- Exhibition Area (2nd Floor of Empress Convention Centre)
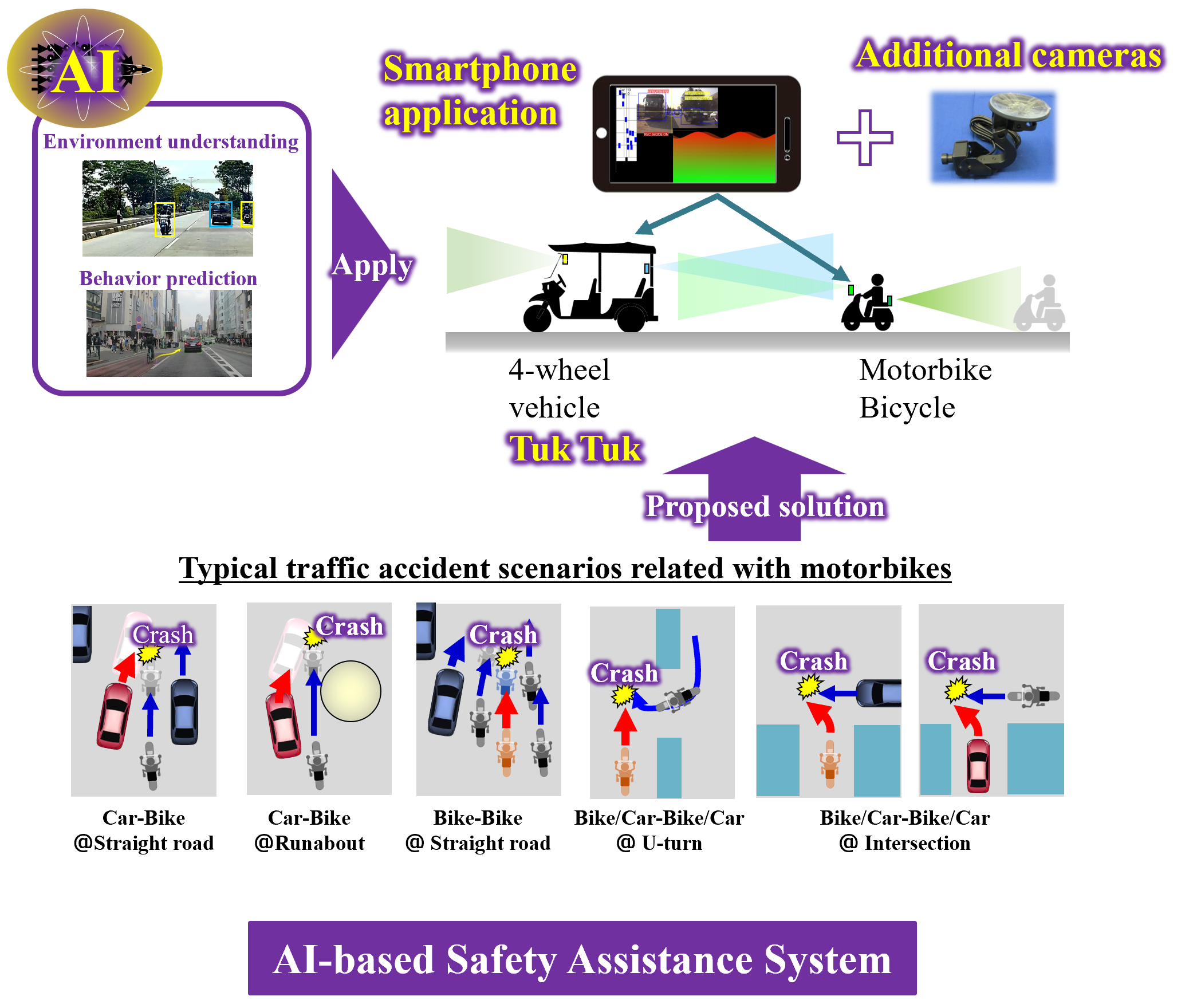
So many fatal traffic accidents have occurred in Asia region due to overcrowded and aggressive traffic. Most traffic accidents are caused by overlooking risks, and there is a strong demand for reasonable safety assistance systems to reduce them. So, “AI-based Safety Assistance System” has been researched as one of solutions that can reduce typical traffic accidents related motorbikes. It is composed of a smart phone, additional cameras and a smart phone application using environment understanding and behavior prediction AIs.
The system detects traffic participants surrounding the ego car/bike/TukTuk through front and rear cameras, and judges risk modes based on velocities and positions of detected traffic participants. When the system predicts the future risk, it notify the existence of risk to a driver/a rider by using a visual indicator and sound.
In this event, the AI-based Safety Assistance System will be installed into a Tuk Tuk, and its live-demonstration be introduced.
Exhibition of “AI Formula”
- Date & Time
- Sep. 9th (Tue.) 14:00–17:00
- Sep. 10th (Wed.) 9:00–17:00
- Sep. 11th (Thu.) 9:00–17:00
- Location
- Exhibition Area (2nd Floor of Empress Convention Centre)
JSAE-SICE Automotive Control and Modeling Committee has conducted the educational project of “AI Formula.” It is not only the race-program of automated driving robot but also the research platform for AI (Artificial Intelligence), control theory, modeling, etc.
In this project, the challengers for AI Formula who are undergraduate and master students in university design a while control system and elemental functions for AI Formula, think new software ideas, develop software by applying them and by using committee’s provided base-software and calibrate their software through actual vehicle tests for annual race event. The challengers can modify hardware of AI Formula such as sensing units, suspension mechanisms, steering mechanisms, etc. So, they can study not only software but also hardware.
Moreover, the challenger cannot use high-definition map, LiDAR SLAM and GNSS-based trajectory control due to AI Formula’s regulation. So, they have to research vision-based automated driving system using cameras and latest computer vision technology including AI. This research activities is valuable in academic research point of view. The challenger have published papers and given technical presentations in SICE’s and JSAE’s conferences.
In this event, AI formula hardware will be displayed and the technical information and activities for AI formula be introduced.

